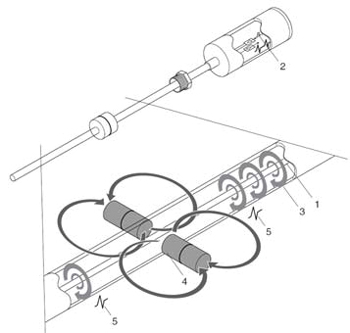
Inside the probe tube there is a rigid wire made of magnetostrictive material. The sensor circuitry emits pulses of current through the wire, generating a circular magnetic field. The level transmitter is a magnet, which is integrated into the float. Its magnetic field magnetises the wire axially. Since the two magnetic fields are superimposed, around the float magnet a torsion wave is generated which runs in both directions along the wire. One wave runs directly to the probe head while the other is reflected at the bottom of the probe tube. The time is measured between emission of the current pulse and arrival of the wave at the probe head. The position of the float is determined on the basis of the transit times.